
|
|
KOGURE Kiyoshi Intelligent Robotics and Communication Laboratories |
|
Fools say they learn by experience. I prefer to profit by other people's experience. Otto von Bismarck "My soldered joints are all poorly formed no matter what I do." "Did you heat the joints before applying solder?" "Oh! Is that necessary?" "You're kidding! You didn't know that?" As seen by this exchange, we often make small mistakes that give us a chance to exchange know-how with others. A person's daily life is a long succession of successes and failures. Sometimes, a small idea may bring about a great achievement, while a trifling failure may invite catastrophe. It is therefore important to share our experiences as knowledge for all, instead of keeping them to ourselves. |
||
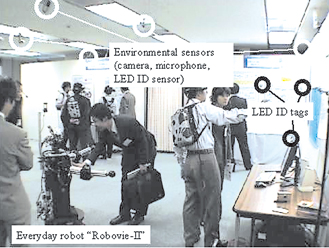 Figure 1. Ubiquitous sensor room |
 Figure 2. Wearable sensor system used in the E-Nightingale project |
 Figure 3. Nursing duty classification obtained from the E-Nightingale project. |
A large amount of data collected by a ubiquitous sensor network would be of no value if they remained difficult to use. Obtaining the information necessary for daily decision-making requires knowledge processing that can summarize the collected data and structure them into knowledge in a form that is easy to use. In some cases, we need very concrete pieces of information about a scene in a particular location at a particular time, while in other cases we need more general, summarized knowledge. We may at times need to track a person's eye movement during cooking, or obtain the specific know-how for skilled soldering. At other times, though, we might require summarized knowledge about general traits, such as the characteristics of places where pedestrians tend to slow down or halt. The E-Nightingale project, our first attempt to obtain summarized information on everyday activities through sensor data, has demonstrated the possibility of dividing observed nursing duties into three major categories of "communication," "taking care of patients in bed", and "supporting patient movement," based on data on posture tilts and the number of steps per minute (Fig. 3). Furthermore, human-machine communication technology is needed to effectively convey the knowledge acquired through such knowledge processing. It is desirable to provide a user with information content that is appropriate for her/his activities in a manner that is appropriate for the situation. Moreover, information should be provided in a persuasive manner. When we try to convey something to another person, we do not usually feed information unilaterally. Instead, we watch the other person's reactions as we proceed, and make choices from the available verbal and non-verbal communication methods accordingly. Since the amount of information we successfully exchange is concomitant with the mutual trust we build, the quality of communication is dependent on our social relationships. Similarly, it would be desirable for an intelligent support system to have not only the ability to provide information but also the social intelligence necessary to build social relations with people. In order to realize such human-machine communication, we have been conducting research on communication robots such as "Robovie" (Fig. 4). In summary, supporting the process of turning our daily experiences into knowledge and making that knowledge available to others requires integrated systems that encompass the sphere of people's activities, record these activities, structure them into knowledge, and provide it to people in an interactive and convincing manner. The need to track and record human activity in an all-round manner and to deliver the acquired knowledge wherever it is required makes it essential for such systems to be "ubiquitous." It is also necessary for such systems to be "embodied" intelligence systems, since having the means to interact with the external world would form a vital part of their role. Consequently, such systems can be called ubiquitous intelligent robots when the term "embodied intelligence system" is allowed to be paraphrased as "intelligent robot." Establishing ubiquitous intelligent robotics - the technology for the ubiquitous intelligent robot - is one of the key research themes of our laboratories. |
 Figure 4. Everyday robot "Robovie-II". |