|
 |
ISHIGURO Hiroshi Intelligent Robotics and Communication Laboratories |
The prevalence of the Internet as an information infrastructure has significantly changed our lives. By networking the computer, with its countless potential, we have gained access to information processing on a worldwide scale. However, communication over the Internet contains many more restrictions than direct conversation. It is somewhat like sitting at a desk and writing information onto paper, and then exchanging this paper-based information instantly over a high-speed network. However, progress is accelerating in Internet interfaces. For example, the cellular phone is quickly being transformed into a computer terminal. This can be seen as a new form of information infrastructure connecting individuals. We believe that robots will also become a new type of information infrastructure in much the same way. Robots differ from previous information devices in the fact that they can establish human relations. Almost all systems used on the Internet have a distinct purpose, and we learn to use them in order to achieve this purpose. When we exchange and process information in our natural surroundings, though, we do not always have a clear goal in mind. Sometimes the conversation itself clarifies the goal. In other words, our conversations often proceed by asking a person to do something as we simultaneously work on forming a relationship with the person. In some cases, we could even say that forming the relationship is an essential step in seeking assistance. This shows how narrow and superficial the communication is between humans and computers over the Internet. In order to make Internet systems useful for everyone, they are designed to carefully separate the human relationship from the mechanical task. On the other hand, our aim is to build a relationship between robots and humans and then allow tasks to emerge from the relationship. This new information infrastructure will provide us with processing capabilities that are not possible with the existing infrastructure. Figure 1 shows the robots that we are developing. The reason why
they are humanoid in form is that they need to resemble humans for smooth
communication. Humanoid robots are also well suited for both verbal
and non-verbal communication, using eye contact, gestures and so on. |
|
 Figure 1. Everyday Robots. |
One aspect of our robotic research, of course, is design methodology to determine how to design and develop a robot. Another aspect is to evaluate how well they interact with humans. Our approach to the design methodology aspect is to install as much human-human communication knowledge as possible into each robot. Whereas robots are generally designed by a top-down method based on knowledge of human information processing mechanisms, this approach is not necessarily correct. We take a bottom-up method to build robots with richer communication abilities. To be specific, we build programs for as many robot behaviors as we can imagine, and then we define transition rules among the behaviors. Figure 2 shows an episode editor that supports this development by enabling us to correct robot programs on-line while visually confirming the relations among active robot behavior modules. With respect to the evaluation aspect, we conduct interdisciplinary research with professionals and teams involved in fields other than robotics. We want to connect robotics with other areas of study in human behavior, such as cognitive science and psychology, that will lead to new forms of robot research. |
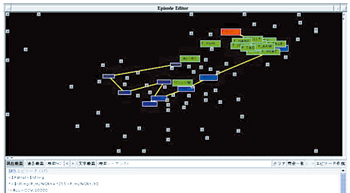 Figure 2. Episode Editor. |
Figure 3 shows an approach to evaluating the impressions that humans receive from robots. Subjective human impressions exhibit a close relation with body movement, which is precisely observed by a motion tracking system. The left side of the figure shows the 3-D motion tracking system, and the right side shows the CG-generated results. Our impressions of others unconsciously appear in the form of fine body movements when we interact with both humans and robots. For example, a person who has a friendly conversation with a robot and receives a good impression will have frequent eye contact with the robot, and will move his or her body in sync with the robotユs movement. This evaluation research links subjective evaluations with objective numerical data. |
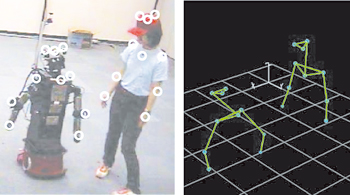 Figure 3. 3-D motion tracking system (left), and CG-generated results (right). |
So far, we have mainly dealt with interactions between one person and one robot, or between a few persons and a few robots. We must now extend our study to cover many humans and robots, and to lengthen the period of interaction. There are huge differences between relationships built during a one-hour interaction and those built over a year's time. However, at this stage, robotics, cognitive science and social psychology all lack sufficient knowledge of just how people will accept robots, and what kind of behavioral programs should be built-in to them. We need to collaborate more closely among interdisciplinary research areas and to develop new forms of robotics research. We believe the time has come for robots to leave the laboratory and join in open experiments within society. We recently conducted a one-month experiment in an elementary school as a step toward this new research stage. More research will be needed to obtain precise results, but we were able to gain a variety of knowledge on how children accept robots and how they establish relationships with them. Figure 4 shows a view of this experiment. |
 Figure 4. Scenes from an experiment in an elementary school. |
As stated in the beginning, we strongly believe that everyday robots will evolve into a new form of information infrastructure that is capable of linking humans and information processing equipment, enabling us to access information that cannot be gained from computer networks. In that sense, the real-life field experiments proposed above are extremely important. Before we can solve the basic problems in robot-human communication and social interaction, we need to identify the problems themselves. To do this, our research must move from the laboratory into society, and short-term experiments must give way to experiments over longer periods of time. |