
|

|
KAWATO Mitsuo Computational Neuroscience Laboratories |
|
Introduction Advancements in human communication technologies |
||
Table 1. Future communication technologies. |
| 3 million yrs. ago | Mimesis | Collaborative work |
| 200,000 - 30,000 yrs ago | Language | High efficiency |
| Several thousand yrs. ago | Codes | Surpassing boundaries of time and space |
| Several hundred yrs. ago | Transportation (physical) | Not in real time |
| 160 yrs. ago | Telegraphs | Codes / real time |
| 120 yrs. ago | Telephone | Spoken language / emotions |
| 20 yrs. ago | Internet | Codes → Passive images / audio |
| Future | Mimesis + time + space + culture ; Agent communications |
Brain research + robots |
Difficulties to be overcome by future communication technologies Let us assume that a husband and wife who enjoy playing tennis are living apart because the wife lives in Japan and the husband has been stationed in the U.S. for work. Nevertheless, the two want more than anything to be able to play tennis together. In order to actually play tennis (to experience the physical feelings), as shown in Fig. 1, there would have to be an "agent" robot of the husband near the wife, and an "agent" robot of the wife near the husband, with the two playing tennis in Japan and the U.S. at the same time. The greatest obstacle in enabling these two people to play simultaneously is to overcome the time delays that accompany communications. Anybody who has had the unpleasant experience of delays of several seconds in verbal and facial communication cues during teleconferencing using satellites would think that it is impossible to overcome these time delays. The only way to resolve this problem would be to mount a quantitatively good model of the husband's brain into the husband's agent robot, though only for a short time. We once heard a comment that in a sense, this is equivalent to creating a short-term time machine. |
 Figure 1. The husband's brain in the husband's agent robot. |
Integrating robot research and brain research As explained above, if we can successfully develop a more human-like humanoid robot based on an understanding of the basic functions of the brain, then we will be much closer to achieving revolutionary futuristic communication terminals. The problem of time delays can only be resolved by installing into terminals quantitative brain models of the persons communicating, and by giving these terminals the ability to imitate the users. This is an indication that the field of telecommunications will eventually demand an integration of communication technologies based on both neuroscience and robotics. |
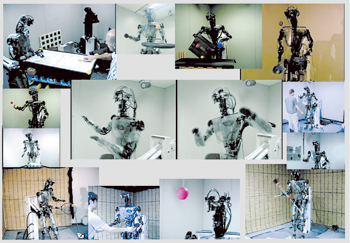 Photo 1. DB showing off its skills. |
DB learns by imitation Atom Plan |
Table 2.24 performances by DB. |
| Learning from Demonstration | (1) Okinawa Dance Imitation (Kachyaasi) |
| Eye movement | (13) VOR Adaptation (14) Smooth Pursuit Learning (15) Saccade (16) Combination of 3 Eye Movement Primitives |
| Task dynamics Physical interaction Learning | (17) Paddling (18) Learning of Visuo-Motor Transformation (19) Catching a Ball (20) Drumming Joint-Performance (21) Sticky Hand (22) Non-Calibrated Visuo-Motor Transformation (23) Yo-yo and Slinky (24) Flexible Object Manipulation |